
在自动驾驶汽车的技术发展过程中,汽车对周边环境的感知与理解,是实现自动驾驶的基本前提。传感器是实现自动驾驶的基础,只有准确及时地感知车辆周围的道路、其它驾驶主体、行人等信息,自动驾驶汽车的驾驶行为才会有可靠的决策依据。
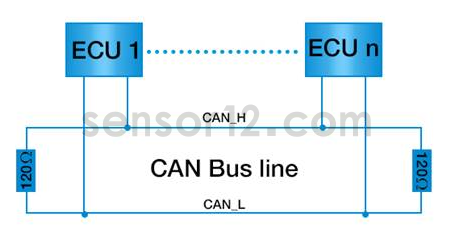
根据国家标准GB7665-87,传感器是能感受规定的被测量并按照一定规律(数学函数法则)转换成可用信号的器件或装置。雷达传感器是为汽车提供环境感知、规划决策的智能传感器,其核心原理为通过发射微波、声波或激光并接受回波来进行物体探测,是自动驾驶的核心传感器,起到无人驾驶汽车“眼睛”的作用,为无人驾驶提供安全保障。其中,用于环境感知的主流雷达传感器包括超声波雷达、毫米波雷达和激光雷达三种。
超声波雷达在近距离探测、成本和尺寸方面具备优势,但远距离探测、分辨范围、探测精度、成像能力及检测速度等性能方面表现较差,适用于泊车场景。
毫米波雷达在各指标的表现均衡,具备全天时全天候工作能力,且价格适中,性比价最高,被广泛应用于盲区检测、自适应巡航等ADAS场景。
激光雷达采用激光测距技术,可实现三维环境建模,在成像能力方面远超出其他两种雷达传感器,但其近距离探测能力和全天候工作能力较差,且存在尺寸巨大、成本高昂的缺陷,多应用于高等级自动驾驶如L4级汽车上。