

工作原理
步进电机通过控制电流的脉冲来驱动电机转动,每收到一个脉冲就会前进一个固定的步进角。步进角通常为1.8°。如果步进电机的驱动器具有细分功能,比如设置成32细分,则微步距角就变为为1.8°/32=0.05625°。
伺服电机通过测量反馈信号来控制电机转动,以实现精确的位置或速度控制。通常使用编码器作为反馈装置来监测电机的转动位置,通过闭环控制系统来调整电机的输出。
控制方式
步进电机一般是开环控制,在每个步进角脉冲驱动下,转子以固定的角度前进。控制精度较低,但易于实现和控制。在有些要求高的场合,通过增加编码器等反馈装置,也可以实现步进电机的闭环控制。
伺服电机是闭环控制,在控制器的反馈信号引导下,根据目标位置或速度来调整电机输出。控制精度高,但控制算法更复杂,成本也较高。
应用领域
步进电机常用于需要简单粗略定位或旋转的应用,例如打印机、3D打印机、CNC机床等。
伺服电机则广泛应用于需要高精度和高性能控制的应用中,例如机器人、数控机床、自动化设备等。
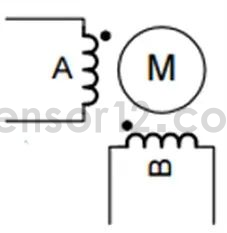
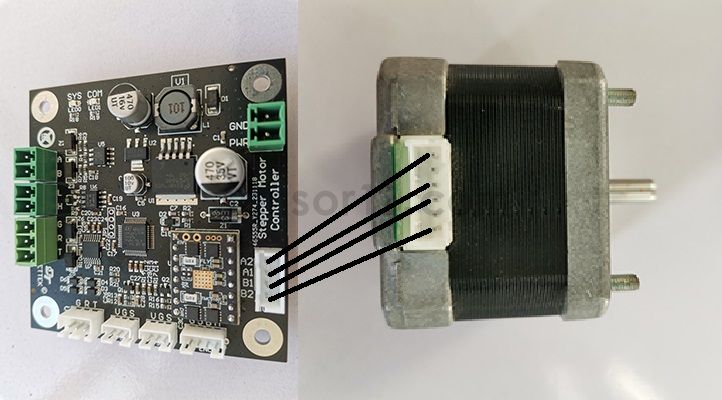
● 支持所有两相4线/6线步进电机,如20/28/35/36/39/42/57/60型和蠕动泵
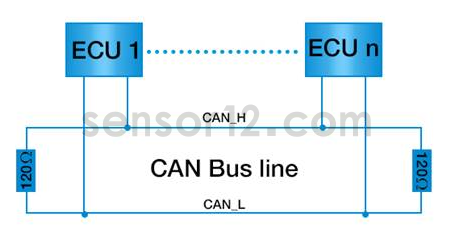
● 通讯接口:Uart、RS485、RS232、CAN总线
● 支持两端限位光电开关
● 独有的静音算法
● 提供上位机调试软件和通讯协议,方便二次开发
 |