
关节臂机器人有许多零件组成,并且需要能够平稳地旋转所有轴,因此需要完美的执行器来以合适的类型和力度为其专业运动提供动力。具有关节臂的机器人通常不仅要完成平凡的任务,还要在危险或高风险的环境中执行类似人类的动作,因此电机必须完全符合这些要求。市场上似乎有无穷无尽的直流、步进和伺服电机产品可供选择,每种产品都有各自的优点和缺点。在回答了几个关键问题后进入选型过程将大大简化选型过程。

在选择电机为带有机器人关节的机器人提供动力时,需要考虑以下几个因素:
1. 使用什么类型的机器人关节?
机器人关节常见的类型有线性、正交、旋转、偏移、滑动等。您的应用是使用更简单的线性和正交接头,还是使用更动态的扭转或旋转接头,还是两者兼而有之?这会决定运动的类型及其要求的相关细微差别。
2. 项目中可以容忍多大噪音?
如果您的应用将在远离人的工厂中使用,则噪音可能不是问题。但是,如果它与人类一起使用的时间超过很短的时间,您可能会更喜欢更安静的电机。
3. 需要多大的精度?
当机器人用于在仓库中移动货架时,不需要太多的精度,而在填写处方时则没有出错的余地。不同的电机以不同的方式提供精度,有些电机具有明显的缺点;重要的是要知道哪些是您的产品允许的。
4. 需要多大的扭矩?
扭矩可以在不同的速度和不同程度的恒定性下实现。如果只需要在特定速度下获得高扭矩,则可以牺牲不必要的扭矩能力来换取其他电机功能。
现在,让我们根据这些考虑因素来回顾一下最常用于在典型关节臂机器人上运行应用程序的三种类型的电动机——直流电机、步进电机和伺服电机。
直流电机有有刷和无刷两种。人们普遍认为无刷直流电机已经取代了有刷电机,但有刷直流电机在某些应用中仍然很受欢迎。有刷直流电机的效率约为 75%–80%,在低速时可实现高扭矩,并且易于控制,但用于旋转机器的电刷,会产生相当大的噪音。另一方面,无刷直流电机更安静,甚至更高效,并且可以保持连续的最大扭矩,但更难控制,有时可能需要专门的调节器。虽然直流电机通常提供低扭矩,但它们可以实现高速,适用于洗衣机、风扇、钻头和其他需要恒定圆周运动的机器。
可以选择在系统中添加齿轮箱,以使机器人关节机构为机器人应用创造更大的扭矩。但注意,电机和齿轮箱应设计为协同工作,因此在这种情况下建议购买带有集成齿轮箱的电机。
步进电机可以控制精确的运动,在低速时具有最大扭矩,并且易于控制,这使得它们在过程自动化和其他一些机器人技术中很受欢迎。然而,它们有几个缺点:它们噪音大且效率相对低下,并且由于它们持续消耗最大电流而运行得很热。最后,由于它们的最高速度较低,因此众所周知,它们在高负载下会失步,这在某些关节臂应用中是一个重要缺陷。尽管存在这些局限性,但它们已被证明在医学成像机、3D 打印机和安全摄像头中是有效的。
伺服电机提供极其精确的运动,这要归功于一个反馈回路,该反馈回路可以感应并纠正实际速度和目标速度之间的差异。它们可以在高速下提供高扭矩,甚至可以处理动态负载变化。此外,伺服电机重量轻,效率高。使用伺服电机的缺点包括它们在响应反馈时可能出现抖动,以及对复杂控制逻辑的要求。尽管有这些缺点,但伺服电机提供的精度通常使它们成为关节臂机器人的不错选择,其复杂的运动旨在与人类的运动相匹配!
您的关节臂机器人可能会执行敏感任务并带来很高的期望,因此您需要一个电机,不仅为您的系统提供动力,而且使您的机器人最适合其运行环境。在选择电机时,确保您确切地知道要实现的目标并对优先级进行排序,这将有助于您做出明智的功能权衡,以获得最佳性能和适用性。
文章来源:www.roboticstomorrow.com
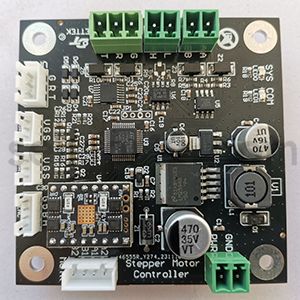
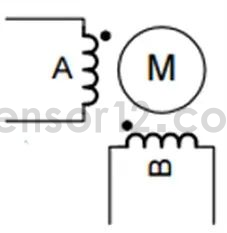
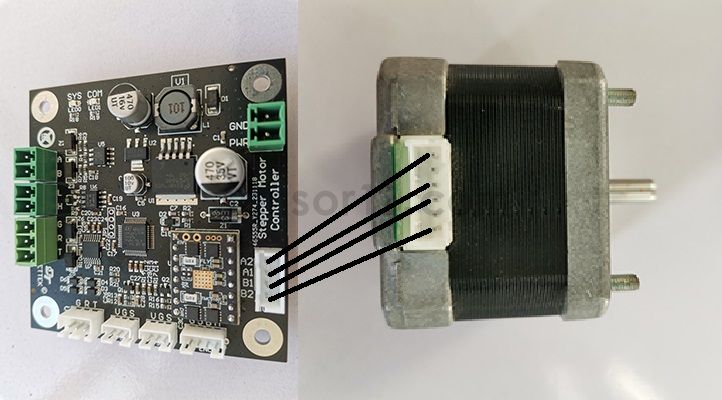
● 支持所有两相4线/6线步进电机,如20/28/35/36/39/42/57/60型和蠕动泵
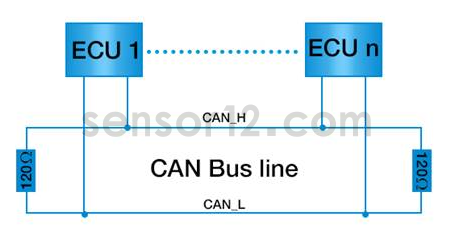
● 通讯接口:Uart、RS485、RS232、CAN总线
● 支持两端限位光电开关
● 独有的静音算法
● 提供上位机调试软件和通讯协议,方便二次开发
 |